Electrical Engineering
Robot Electrical Architecture (36 DoF)
System Overview
This robot is a 36 DoF humanoid platform powered by a 12.6V (3S4P) battery system.
The design separates high-current servo power from logic + sensor control, using an ESP32 + Raspberry Pi hybrid architecture.
Degrees of Freedom
DoF Distribution
Legs: 4 DoF × 2 = 8
Arms: 4 DoF × 2 = 8
Hands: 8 DoF × 2 = 16
Neck: 2 DoF
Torso: 2 DoF
Total: 36 DoF
Power Distribution
Main Flow
Battery (12.6V) → XT60 → Fuse → Split
Then:
→ Buck (8V) → Legs + Arms
→ Buck (5V) → Hands + Neck
→ Direct 12V → Torso servos
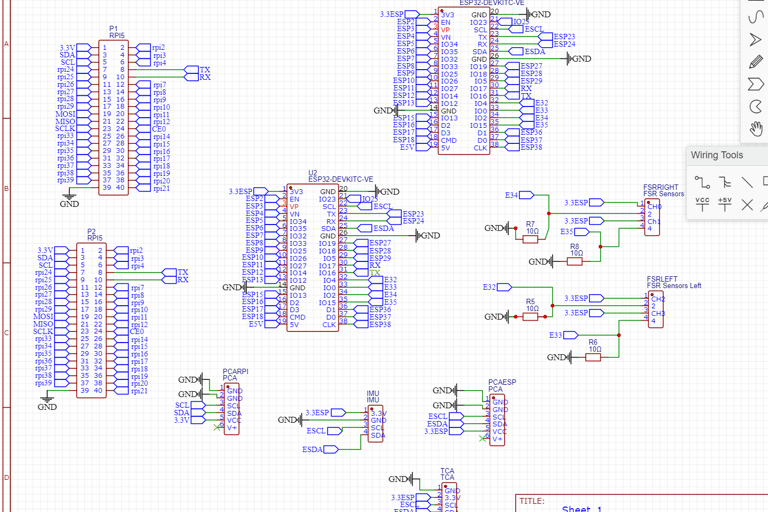
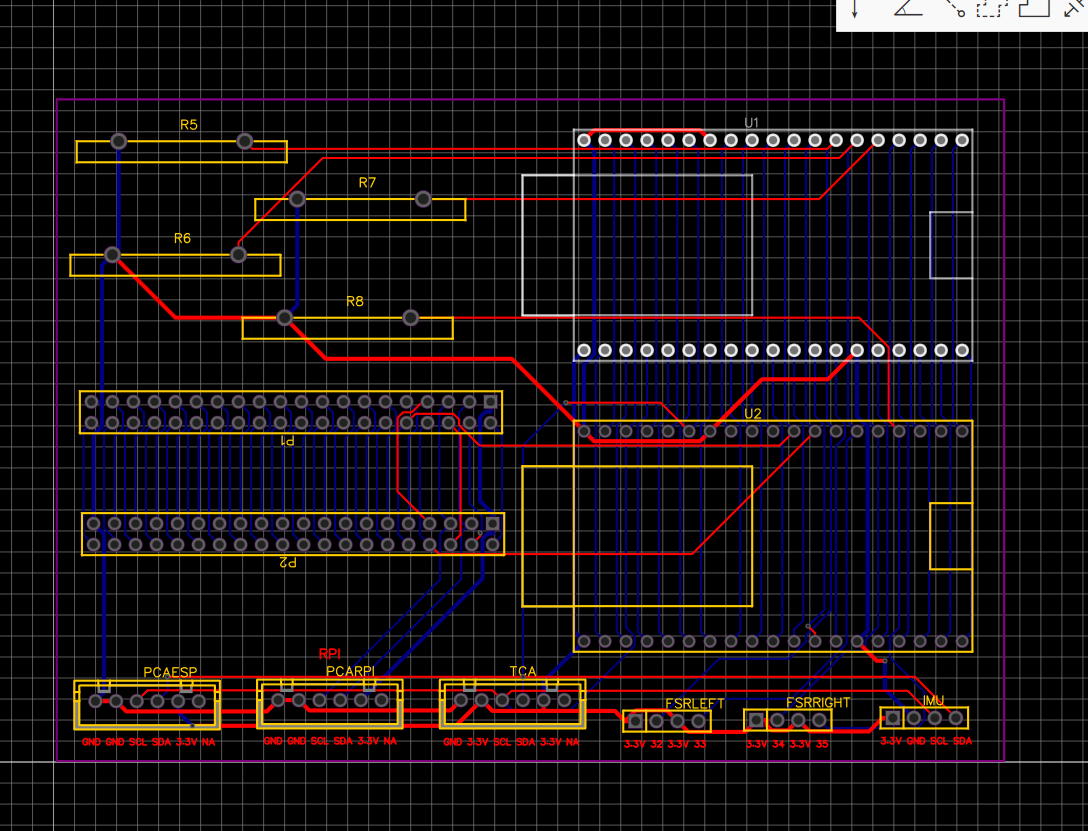
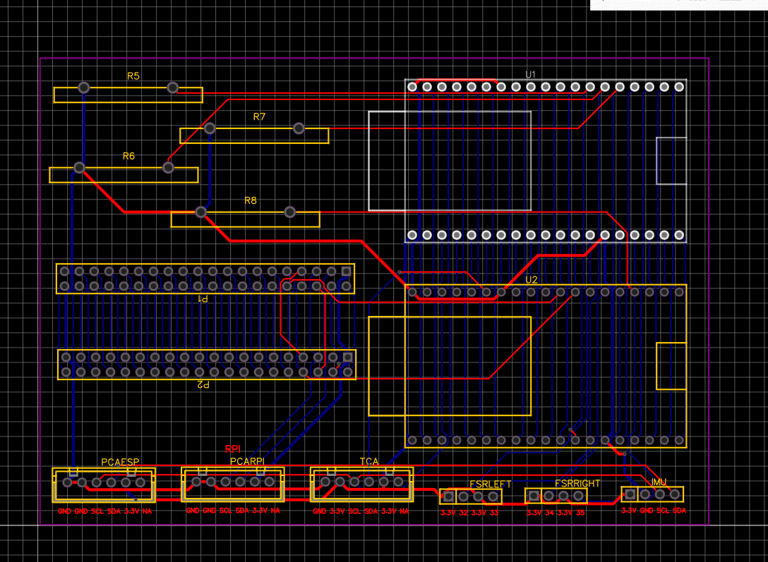
PCB and Wiring Design
Board Layout
The custom PCB is designed to handle power distribution, signal routing, and component integration within a single compact system.
The layout is divided into:
controller regions
sensor interfaces
servo driver connections
power distribution paths
Controllers
The system uses a dual-layer control architecture:
Raspberry Pi 5
Handles AI processing, vision, and high-level decision-making
ESP32 Microcontrollers
Handle real-time control
Read sensor data
Manage fast I/O operations
Communication between controllers is handled over UART.
Servo Control System
Servo actuation is managed using multiple PCA9685 PWM driver boards, connected via I2C.
Generates precise PWM signals for all 36 servos
Allows scalable expansion without overloading the main controller
I2C Expansion
An I2C multiplexer (TCA) is used to manage multiple devices on the same bus.
This enables:
simultaneous communication with multiple PCA boards
integration of sensors with overlapping I2C addresses
Sensor Integration
IMU
An inertial measurement unit provides:
orientation data
balance feedback for walking and stabilization
FSR Sensors
Force-sensitive resistors are placed in the feet to detect:
ground contact
weight distribution
Each FSR is implemented using a voltage divider circuit and read through ESP32 analog inputs.
Signal Flow
Sensor data is processed and converted into actuation commands through the following pipeline:
Sensors → ESP32 → Raspberry Pi → PCA9685 → Servos
Design Highlights
Separation of high-level processing and real-time control
Scalable servo architecture using PWM driver boards
Robust I2C communication with multiplexer support
Dedicated sensor processing for stability and interaction
Multi-voltage power system optimized for performance and reliability
Summary
The system is designed as a high-current, modular electrical architecture for a full humanoid robot.
It supports 36 degrees of freedom, distributed control, and stable operation across multiple voltage domains while maintaining scalability for future expansion.
Contact
swayamrathod@sway.bet
(404) 910-6857