Swayam's Portfolio
Explore my education, projects, and certifications in detail.


About Me
I’m driven to build tools and systems that meaningfully serve humanity.
I am a Physics major at Georgia State University and incoming Mechanical Engineering student at Georgia Tech. I previously served as President of the Engineering Club at Gwinnett Technical College.
I am also the founder of early-stage ventures including Spookey, a robotics platform focused on humanoid systems, and SwayForm, a concept for collaborative engineering and project sharing. Spookey is currently in active development, with plans to launch initial sales by the end of the year, targeting humanoid robot systems in the ~$5,000 range. More details to come as development progresses.
My technical work spans mechanical design, electrical systems, and software. I am currently developing a humanoid robot from the ground up, involving CAD modeling, 3D printing, servo actuation, sensor integration, embedded control using a Raspberry Pi, and AI-assisted behavior using Python and ROS2. I also design schematics and PCBs using EasyEDA and test custom boards for hands-on robotics applications.
I am the President and Co-Founder of the Robotics Club at Gwinnett Technical College, where I lead hands-on projects and guide peers in CAD, mechanical design, and applied engineering. Through both leadership and project work, I continue to build practical engineering skills that connect design, simulation, and real-world implementation.
Leading the club isn’t just about the robots; it’s about building a community of problem-solvers. We’ve run hands-on workshops, mentored newer students, and showcased our creations to spark curiosity. Through collaboration and leadership, I’ve learned that engineering is as much about people as it is about technology.


Former President, Engineering Club At Gwinnett Tech
Solo Humanoid Robot Project
Spookey is a humanoid robot I’ve been passionately building since April 2025. Designed to not just walk but engage, Spookey represents my vision of merging mechanical design with intelligence, bringing life to a 4.5-foot machine


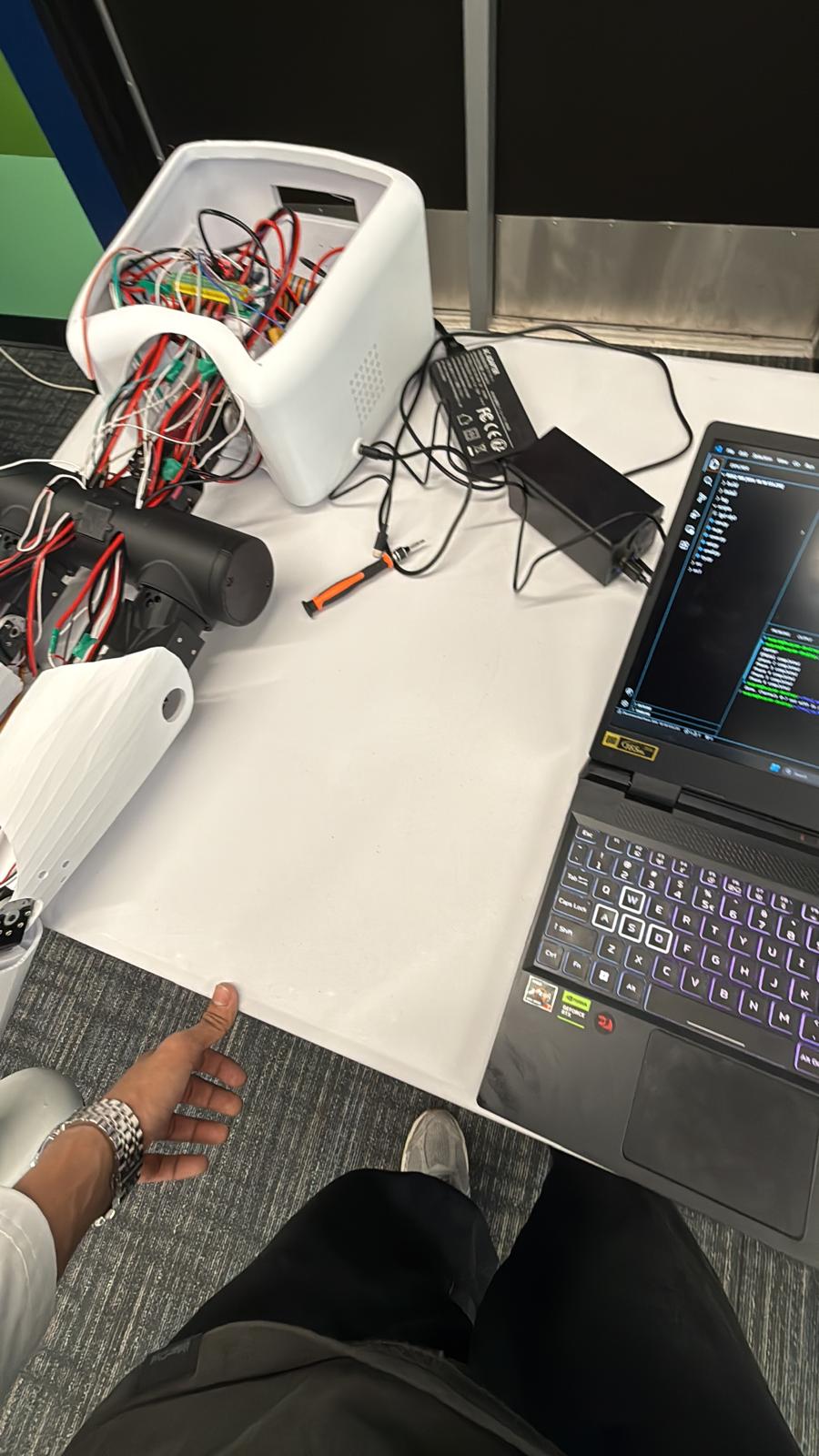
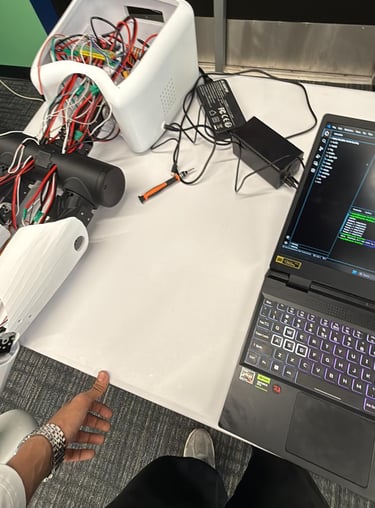
Under the hood, Spookey combines torque-controlled servos with a Raspberry Pi 5 as its brain, communicating with my PC. An ESP32 microcontroller handles precise PID control via a BNO085 IMU. With two TF02 lidar sensors, a 4S4P battery pack, and an onboard BMS, it’s built for dynamic movement and steady control.
Contact
swayamrathod@sway.bet
(404) 910-6857