Top Club Projects
These projects represent some of the hands-on engineering work developed by members of the robotics club. Each project highlights practical experience in robotics, electronics, programming, and mechanical design, showcasing how ideas move from concept to working systems through teamwork and experimentation.


Meet Blue
A voice assistant chatbot using llama2:8b running on a secondary computer, transmitting via SSH from Raspberry Pi 5.
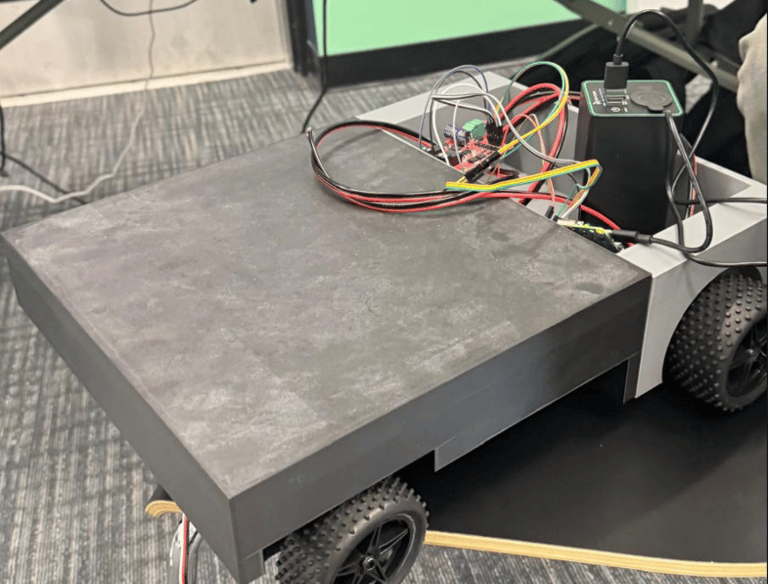
The Rover Base
A mobile robotics base powered by a Raspberry Pi and DROK motor driver, designed as a platform for testing motion control, sensors, and future robotic arm integration.
Blue is a locally powered voice-assistant robot designed to demonstrate how modern AI can run privately on personal hardware. A Raspberry Pi 5 captures spoken commands through a microphone and sends them to a locally hosted large language model running on a secondary computer. The systems communicate through SSH, allowing the Pi to handle the physical interface while the heavier AI processing runs on more powerful hardware.
After the model generates a response, the result is sent back to the Raspberry Pi and converted into speech through a speaker, creating a real-time conversational experience. Blue serves as a compact prototype for experimenting with voice interfaces, local AI deployment, and distributed robotics systems, and it helps test technologies that will later be integrated into larger humanoid robot projects.
The Rover Base is a mobile robotics platform built around a Raspberry Pi that controls its movement through a DROK motor driver. The rover uses an onboard IMU to track orientation and movement, allowing it to collect motion data and improve navigation behavior. The platform serves as a foundation for experimenting with real-world robotics concepts such as motor control, sensor integration, and autonomous movement.
The rover is also designed to support a robotic arm mounted on top. While the arm is still in development, early prototype tests have already demonstrated promising functionality. These initial trials confirmed that the rover can successfully act as a mobile base for manipulation tasks, and future development will expand its capabilities into a fully functional mobile manipulation system for experimentation and robotics research.
Contact
swayamrathod@sway.bet
(404) 910-6857